
The Active Touch Laboratory uses psychophysics, computational modelling, skin imaging, and robotics to investigate tactile sensing in people and intelligent machines.
We are based at the University of Sheffield in the School of Psychology. We are also affiliated with Sheffield Robotics, INSIGNEO Institute for in silico Medicine, and the Neuroscience Institute.
Our research has been funded by the European Union, the Leverhulme Trust, the Medical Research Council, and the Engineering and Physical Sciences Research Council.
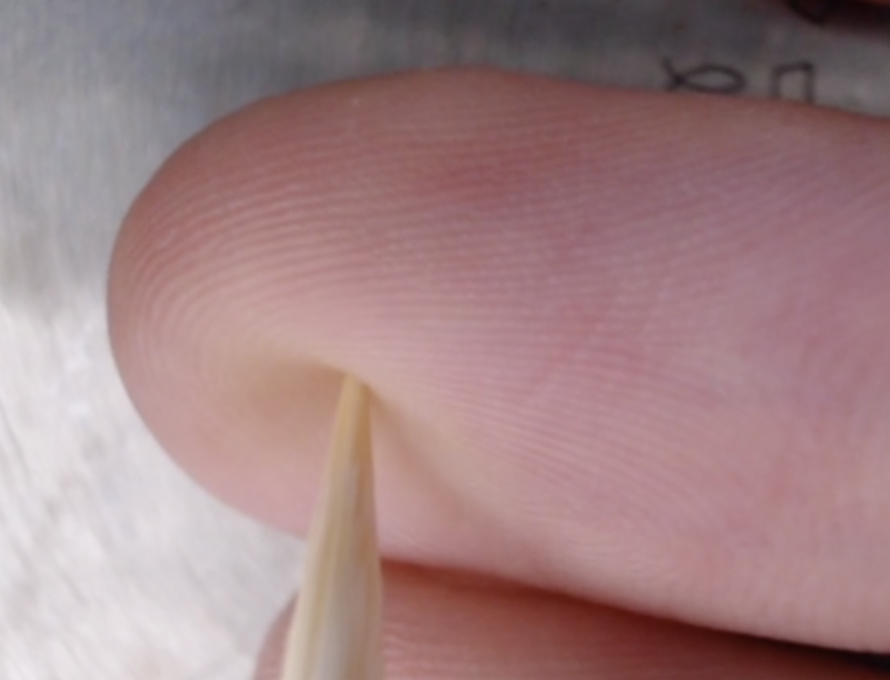
How do the mechanical properties of the skin affect neural coding? Our research aims to uncover how mechanical contact events propagate through the skin, both on a coarse and a small scale, and then drive individual mechanoreceptor responses.
Example publications:
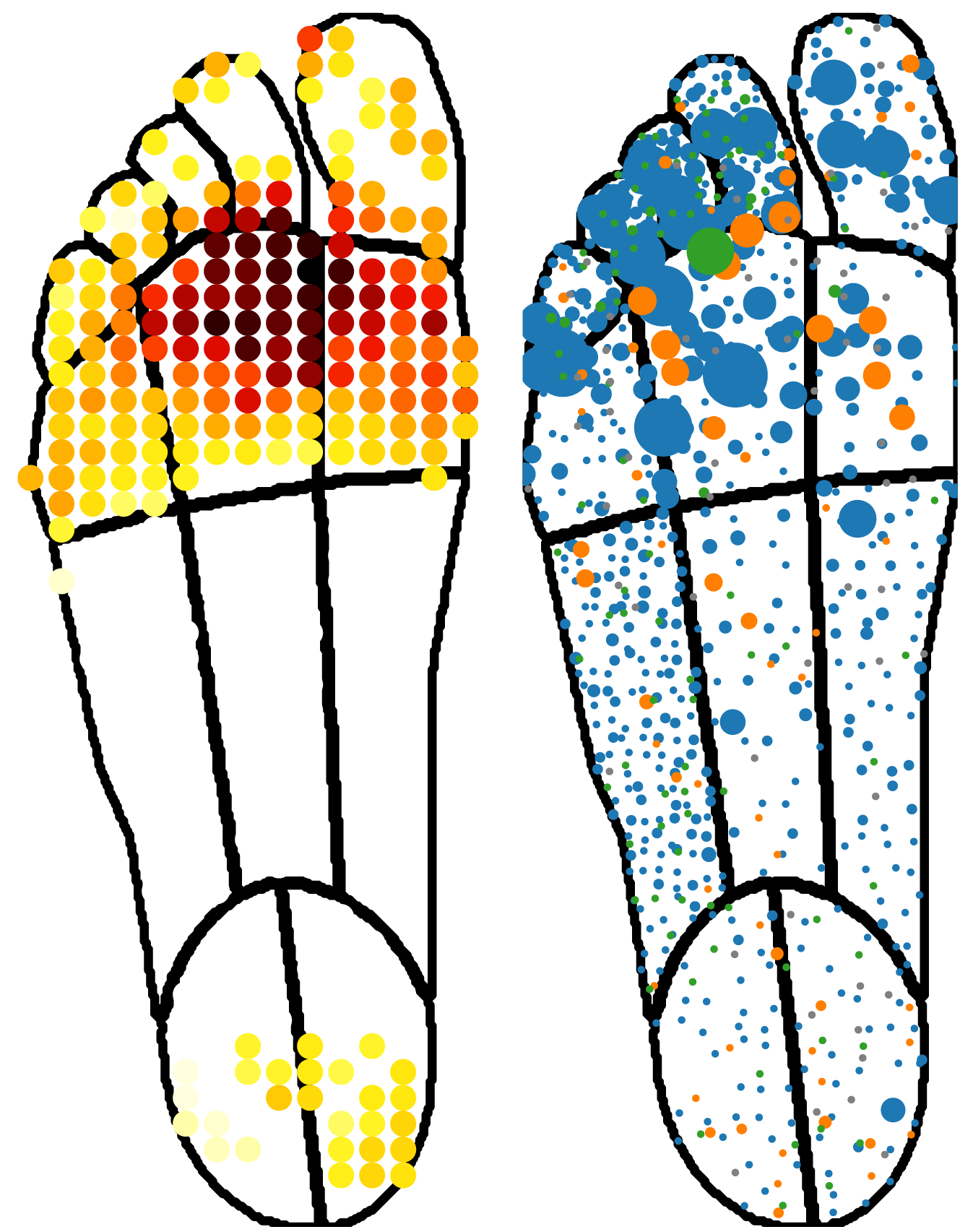
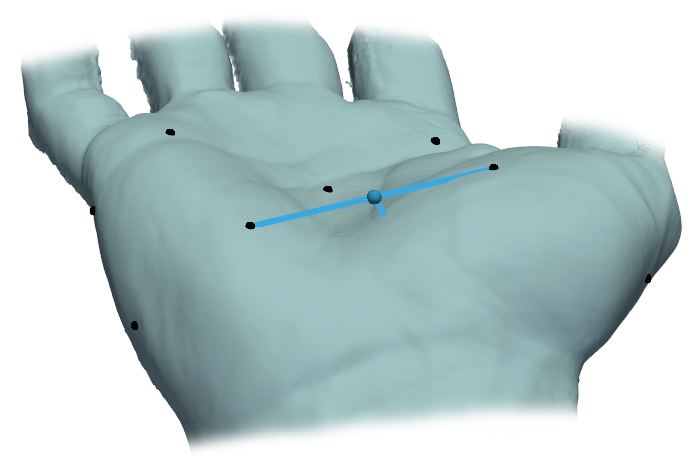
We build large-scale models that simulate population responses from thousands of mechanoreceptive afferents innervating the hand or the foot. These models can help investigate neural coding on the population level and are employed in neuroprosthetic and robotics applications.
Example publications:
Using careful psychophysical testing, we explore how we perceive both external objects and our own body through the sense of touch.
Example publications:
Using computational models ranging from the abstract to the detailed, we explore how touch is represented in the brain. We also investigate how these representations can adapt over time and how they might shape perception.
Example publications:
Ella starts her SURE-funded summer project, investigating 3D body representations.
04/12/2025Giulia's paper on sub-surface fingerprint ridge deformations is out in eLife. Check out the eLife Podcast where Giulia explains the findings.
16/11/2025James, Luke, and Hannes attend the Society for Neuroscience Annual Meeting in San Diego.
01/10/2025Shang Shi starts as a new PhD student in the lab, working on distributed tactile sensing. Welcome!
19/02/2025Mia's findings on skin stretch from her SURE project are published in J R Soc Interface.
08/01/2025Celia, Holly, and Hannes attend the EPS conference in London to present their work on body representation.